Japan's Moon Lander Survives Two Weeks Lunar Night Despite Bumpy Landing
Japan's moon lander survives two weeks lunar night despite bumpy landing. Japan's space agency successfully regained contact with its SLIM moon lander on Sunday, defying expectations of its functionality.
Author:Paula M. GrahamReviewer:Hajra ShannonFeb 27, 20242.4K Shares75K Views

Japan's moon lander survives two weeks lunar night despite bumpy landing. Japan's space agency successfully regained contact with its SLIM moon lander on Sunday, defying expectations of its functionality.
The Japan Aerospace Exploration Agency (JAXA) announced the reestablishment of contact with the Smart Lander for Investigating Moon (SLIM) spacecraft via its dedicated SLIM account on X, formerly Twitter, early on February 26. Around 5:00 a.m. Eastern Time (1000 UTC), the mission team received telemetry from SLIM. JAXA reported that the temperature of the communication equipment was exceedingly high due to the sun being high over the landing area, leading to the termination of communication after a brief period.
Despite not being originally designed to survive the harsh conditions of the lunar night, the SLIM team is now gearing up to conduct observations using SLIM's multiband spectroscopic camera (MBC) later in the lunar day. The MBC is specifically engineered to analyze the composition of the lunar surface, offering potential insights into the moon's history. Sunset over Shioli crater, where SLIM made its landing, is scheduled for February 29.
During the roughly 14-Earth-day lunar nighttime, temperatures plummet to below minus 130 Celsius, posing a significant threat to electronics. To enable prolonged operations, other spacecraft have used radioisotope heater units to provide essential heating during lunar nights.
The spacecraft, also known as "Moon Sniper" for its mission to achieve a precise landing, achieved its historic touchdown on January 19. This accomplishment propelled Japan into the exclusive ranks of the United States, the former Soviet Union, China, and India, as one of the few nations to successfully execute robotic lunar soft landings. Additionally, Intuitive Machines made history by becoming the first private entity to land on the moon with its Nova-C lander, named Odysseus, although it likely tilted over upon landing.
However, SLIM's operations on the lunar surface have been constrained due to the unintended orientation of the spacecraft following the landing. Shinichiro Sakai, the project manager for SLIM, provided an update to the Space Development and Utilization Subcommittee of Japan's Ministry of Education, Culture, Sports, Science, and Technology (MEXT) on February 26, Japan time.
Sakai reiterated that the landing encountered difficulties due to the failure of one of the two engines when there were approximately 50 meters left in the descent. This led to uncontrolled lateral movement, causing the lander to tip onto its nose, with the main engine pointing upwards.
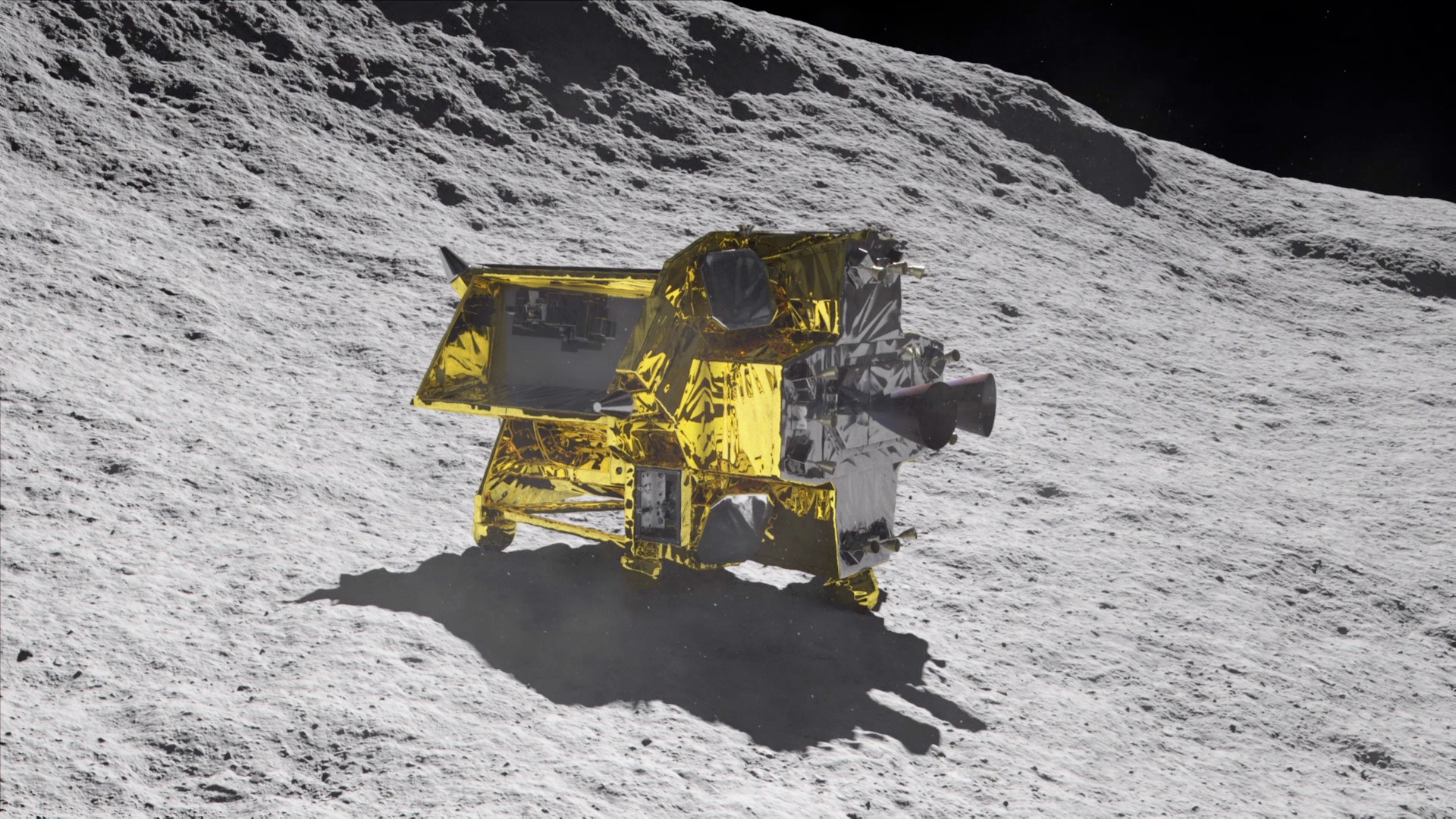
SLIM was designed to tip onto its side upon landing, using five crushable, 3D-printed aluminum lattice landing legs for cushioning. However, due to SLIM's solar cell facing westward, away from the sun, the spacecraft had to power down just over two hours after its January 19 landing. Communication with the spacecraft was reestablished on the night of January 28th once sufficient power was generated from the solar cells.
Sakai stated that the team is currently conducting a thorough investigation into the cause of the engine malfunction and will explore potential future countermeasures. The precision landing technology of SLIM holds promise for enhancing the scientific outcomes of future missions, enabling teams to target very specific locations of interest rather than general areas.
Additionally, SLIM carried a pair of small, innovative rovers that were successfully deployed onto the lunar surface during the final stages of descent. The Lunar Excursion Vehicle 1 (LEV-1), weighing 2.1 kilograms, uses a hopping mechanism, while LEV-2 is a 0.25-kilogram, baseball-sized, spherical rover.
LEV-1 directly transmitted to Earth an image of SLIM captured by LEV-2, showcasing inter-robot radio wave data transmission and revealing the landing state of the main spacecraft. According to Sakai's presentation, LEV-1 completed seven autonomous hops over 107 minutes.
The Japan Aerospace Exploration Agency (JAXA) announced the reestablishment of contact with the Smart Lander for Investigating Moon (SLIM) spacecraft via its dedicated SLIM account on X, formerly Twitter, early on February 26. Around 5:00 a.m. Eastern Time (1000 UTC), the mission team received telemetry from SLIM. JAXA reported that the temperature of the communication equipment was exceedingly high due to the sun being high over the landing area, leading to the termination of communication after a brief period.
Despite not being originally designed to survive the harsh conditions of the lunar night, the SLIM team is now gearing up to conduct observations using SLIM's multiband spectroscopic camera (MBC) later in the lunar day. The MBC is specifically engineered to analyze the composition of the lunar surface, offering potential insights into the moon's history. Sunset over Shioli crater, where SLIM made its landing, is scheduled for February 29.
During the roughly 14-Earth-day lunar nighttime, temperatures plummet to below minus 130 Celsius, posing a significant threat to electronics. To enable prolonged operations, other spacecraft have used radioisotope heater units to provide essential heating during lunar nights.
The spacecraft, also known as "Moon Sniper" for its mission to achieve a precise landing, achieved its historic touchdown on January 19. This accomplishment propelled Japan into the exclusive ranks of the United States, the former Soviet Union, China, and India, as one of the few nations to successfully execute robotic lunar soft landings. Additionally, Intuitive Machines made history by becoming the first private entity to land on the moon with its Nova-C lander, named Odysseus, although it likely tilted over upon landing.
However, SLIM's operations on the lunar surface have been constrained due to the unintended orientation of the spacecraft following the landing. Shinichiro Sakai, the project manager for SLIM, provided an update to the Space Development and Utilization Subcommittee of Japan's Ministry of Education, Culture, Sports, Science, and Technology (MEXT) on February 26, Japan time.
Sakai reiterated that the landing encountered difficulties due to the failure of one of the two engines when there were approximately 50 meters left in the descent. This led to uncontrolled lateral movement, causing the lander to tip onto its nose, with the main engine pointing upwards.
SLIM was designed to tip onto its side upon landing, using five crushable, 3D-printed aluminum lattice landing legs for cushioning. However, due to SLIM's solar cell facing westward, away from the sun, the spacecraft had to power down just over two hours after its January 19 landing. Communication with the spacecraft was reestablished on the night of January 28th once sufficient power was generated from the solar cells.
Sakai stated that the team is currently conducting a thorough investigation into the cause of the engine malfunction and will explore potential future countermeasures. The precision landing technology of SLIM holds promise for enhancing the scientific outcomes of future missions, enabling teams to target very specific locations of interest rather than general areas.
Additionally, SLIM carried a pair of small, innovative rovers that were successfully deployed onto the lunar surface during the final stages of descent. The Lunar Excursion Vehicle 1 (LEV-1), weighing 2.1 kilograms, uses a hopping mechanism, while LEV-2 is a 0.25-kilogram, baseball-sized, spherical rover.
LEV-1 directly transmitted to Earth an image of SLIM captured by LEV-2, showcasing inter-robot radio wave data transmission and revealing the landing state of the main spacecraft. According to Sakai's presentation, LEV-1 completed seven autonomous hops over 107 minutes.

Paula M. Graham
Author

Hajra Shannon
Reviewer
Latest Articles
Popular Articles